Projekt Knickarm-Roboter
Meinen technischen Interessen
entsprechend entstand der Plan, nebenberuflich einen
5-Achsen Knickarmroboter zu entwickeln und zu
bauen. Das Projekt gliederte sich in
verschiedene Bereiche, die sich bei der Realisierung zeitlich
überschnitten.
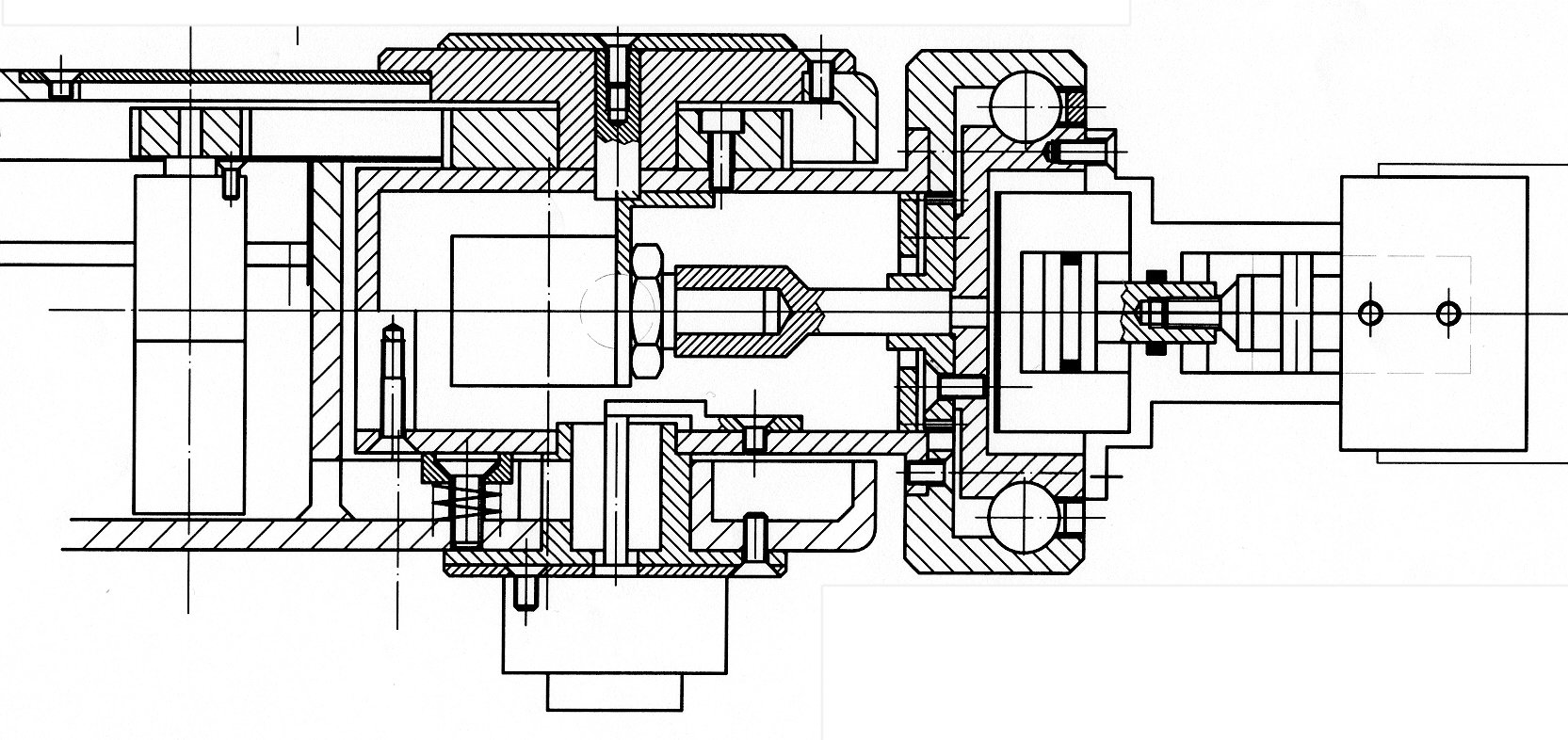
Grobe Planung, Konstruktion
mit CAD, Fertigung und
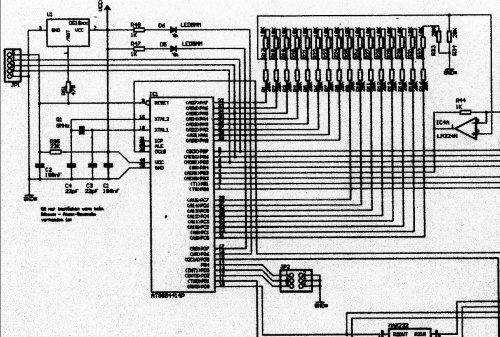
Montage, Steuer- und
Regeltechnik,
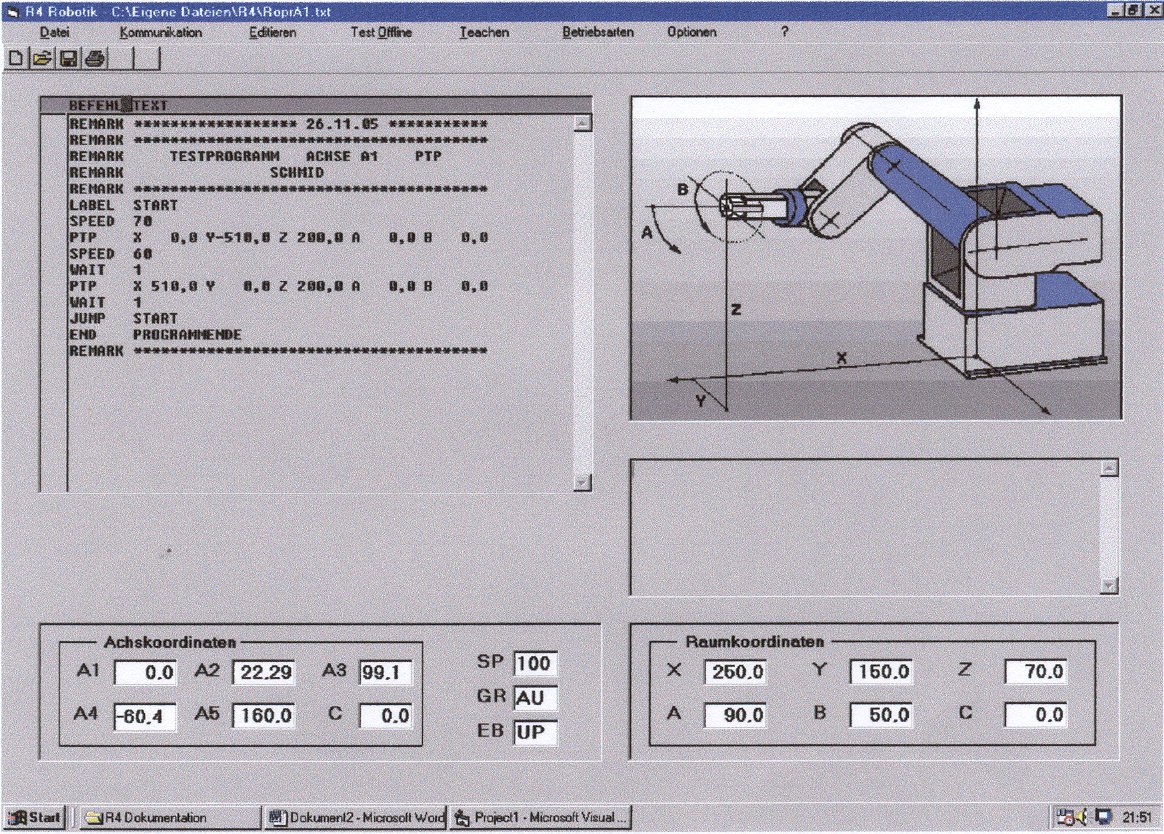
Entwickeln des
Befehlsinterpreters, Programmierung
mit Visual Basic und Systemtest.
|